Fastkit, un projet de recherche sur le picking automatisé
NewsLetter | Fastkit, un projet de recherche sur le picking automatisé | publié le : 09.01.2017
L'IRT Jules Verne et le CNRS se sont lancés en septembre dernier dans le projet de recherche Fastkit, dans le cadre du programme européen ECHORD++ (European Coordination Hub for Open Robotics Development). Il vise à développer sur une période de 18 mois (jusqu'en février 2018) une solution robotique polyvalente et à faible coût pour la logistique, en combinant deux technologies, celle d'un robot mobile (AGV) et celle d'un robot parallèle à câbles, à laquelle travaille déjà l'IRT Jules Verne sur la plate-forme Technocampus Ocean, à Bouguenais, en Loire Atlantique. « La structure du robot à câbles sera installée sur une plate-forme mobile automatisée afin que le robot se positionne à la bonne place le long des racks grâce à la mobilité de l'AGV » explique Alexis Girin, le Responsable de l'équipe de recherche robotique et cobotique à l'IRT Jules Verne. L'objectif est d'aboutir à une solution plus souple, plus polyvalente, et surtout moins chère que les systèmes de préparation automatisés actuels. Facile à installer, reconfigurable et flexible en hauteur, en charge et en vitesse, cette technologie a vocation à être utilisée sur des installations de stockage existantes. Un algorithme de captation et des manipulateurs spécifiques devront être mis au point dans le cadre du projet Fastkit. Créé en 2012, l'IRT Jules Verne est un centre de recherche industriel mutualisé dédié au manufacturing qui regroupe ses propres compétences avec celles des industriels (grands groupes et PME) et des laboratoires de recherche appliquée publics et privés (au total, plus de 50 partenaires académiques et industriels dont une vingtaine de PME). JLR
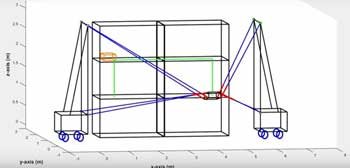
Démonstration de la technologie de robot parallèle à câbles, lors des portes ouvertes de l'IRT Jules Verne, organisée le 5 décembre dernier sur Technocampus Ocean. Le concept du système Fastkit